This article was originally published in the April 2023 issue of Le Monde Forestier
Defoliators that feed on young needles or leaves of host species, such as spruce budworm, hemlock looper, and others, are a recurring natural disturbance that affects more forested land than wildfire in Canada. During outbreaks, there are repeated attacks that reduce the tree’s photosynthetic capacity, which has an impact on growth and may eventually result in mortality. Identifying the risk of an outbreak early on can help deploy control measures through bioinsecticide spray programs, establish preventative and early intervention management, or adjust silviculture treatments (e.g., harvesting). To monitor the extent of large outbreaks, there are two main approaches. The first one consists in aerial surveys where coarse rating of defoliation is determined when damage is visible while the second approach is more predictive, where a sample of eggs / larvae or the percentage of defoliation is collected from single trees and analyzed. In an effort to implement this predictive approach, this study investigates the use of a new drone technology to harvest a large number of samples.
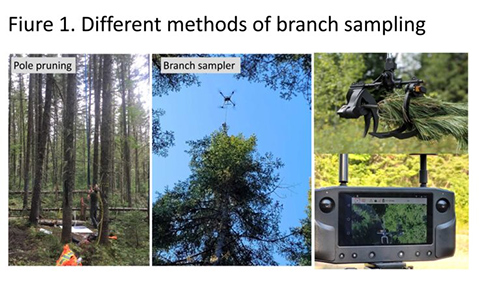
To reliably estimate defoliator populations and defoliation distribution in a province, a large number of trees have to be sampled. Each sample includes 2-3 branches of 50-70 cm length from the mid-to-top matured crown (over 12 m high). Commonly, a pole pruning equipment consisting of extendable lightweight aluminum or carbon fibre poles with a cutting head controlled by a long rope is used to complete such an exercise. Trained personnel are essential to balance the poles for extended periods and navigate between and within the tree crowns safely. Recent advances in robotic technology facilitated the development of a similar concept using a suspended robotic arm (DeLeaves sampler) under a drone and pruning branches of 20 mm from above the canopy using a small rotating saw and two grippers. An example can be seen on the figure from Outreach Robotics (https://www.outreachrobotics.com/). The pilot remotely guides the drone using two cameras (drone and robotic arm) and GPS coordinates to navigate the system to the targeted tree, collect a sample and drop it off at a desired location.

To understand the efficacy of both techniques, FPInnovations conducted a trial with two scenarios – shorter stand closer to the road where samples could be ferried to the road, and a slightly taller stand further from the road where samples were dropped on site. A comparison on rate of sample acquisition showed that pole pruning is efficient when trees are shorter while DeLeaves sampler had a clear advantage over pole pruning in taller stands. Pole pruning required more effort to reach taller trees and consistent vigilance for safer operations. On the other hand, when dense branches were present as is the case for fir trees, it took DeLeaves longer to target the branch.
This specific trial has made it possible to highlight the differences between the two techniques and assess when one or the other would be preferable (Table 1). The main advantage of the drone-based approach is that it is not limited to the tree height or density. A clear advantage would be in pruning tall trees like hemlock or Douglas fir. Also, drone sampling is not physically demanding compared to pole pruning. The drone has an operating radius of 200 m, which makes it ideal to cover large areas or rough terrain. Although, it requires a minimum of two persons (pilot + navigator) to operate the drone system as well as a drone pilot license. Operating time is also limited by weather, such as rain or high winds.
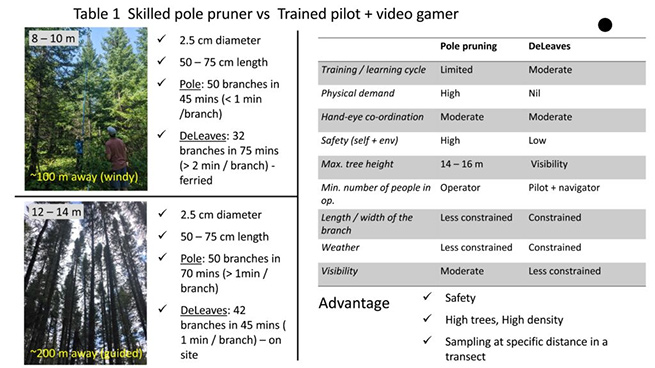
In addition, in some applications (e.g., estimating budworm populations) the size of branch samples needed is bigger than what the drone can carry and would require additional sampling time or modifications to the cutting system. In summary, the drone-based tree branch sampling shows considerable promise as an alternative technique that provides clear advantages in specific scenarios.
To obtain more information on this project, please contact Udayalakshmi Vepakomma (
Source: FPInnovations